Projekt Propelleruhr mit
Mikrocontroller
erstellt von Mathias Meinke und Julian Pape
an den BbS Bremervörde im Dezember 2010



Unsere Ergebnis:

Inhaltsverzeichnis
1 Unsere Vorstellungen
2
Planung
2.1 Der Schaltplan
2.2 Die Platine
2.3 Die Stückliste
3
Umsetzung und die
Probleme
3.1 Es dreht sich
3.2 Spannungsversorgung
3.3 Software
3.4 Funktionstest
3.5 Stellen der Uhrzeit
4 Ergebnis und einige Tipps
5 Bilder vom Projekt
6
Quellenangabe
1 Unsere Vorstellungen
Wir
sollten uns im
Lernfeld 15 (Multimediale Consumergeräte
einrichten) ein
Projekt aussuchen,
welches wir umsetzen möchten. Wir haben uns für die Mikrocontroller
entschieden
und mit dem "Lernpaket Mikrocontroller - Technik mit Bascom"
ein super Einsteigerpaket gefunden und viel Erfahrungen gesammelt.
Aber die Menschheit will immer mehr. Nach ein paar Wochen haben wir uns ein neues Ziel gesetzt, wir wollten eine Propeller-Uhr! Bekannt aus vielen Internetvideos. Gesagt, getan ...
2 Planung
2.1 Der Schaltplan
Um Zeit zu sparen, haben wir uns im Internet auf die Suche nach einem fertigen Schaltplan gemacht. Nach etwas Recherchieren hatten wir den folgenden gefunden.
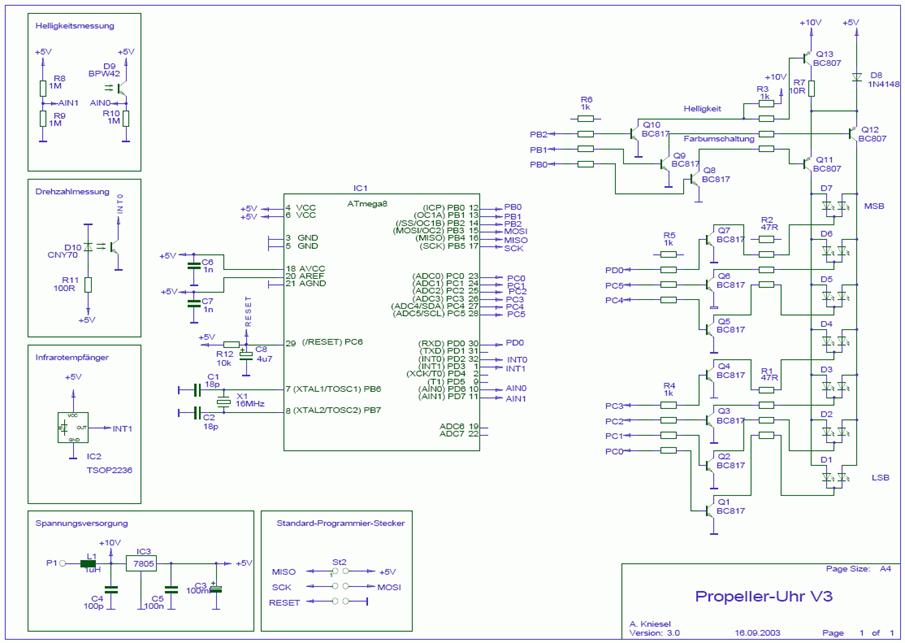
Da
im Schaltplan SMD-Bauteile
verwendet wurden, mussten wir den Schaltplan
so anpassen, dass wir ohne SMD-Bauteile
auskommen.
Des Weiteren haben wir den Schaltplan und die Bauteile auf unsere
Bedürfnisse
angepasst und teilweise vereinfacht.
2.2 Die Platine
Die Platine dazu haben wir selber mit dem Programm Lochmaster entworfen. Alle Bauteile haben auf eine 50x160mm großen Lochrasterplatine Platz gefunden.
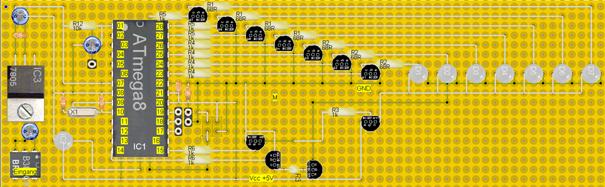 Platinenlayout mit
Lochmaster
Platinenlayout mit
Lochmaster
Das
Programm Lochmaster
hat die Möglichkeit Bauteile grafisch auf die Lochrasterplatine zu
setzten und
zu verbinden. Als "Abfallprodukt" wird gleich eine sehr hilfreiche
Bauteile-Stückliste erstellt.
2.3
Die Stückliste
| D1
Duo-LED 5mm D2
Duo-LED 5mm D3
Duo-LED 5mm D4
Duo-LED 5mm D5
Duo-LED 5mm D6
Duo-LED 5mm D7
Duo-LED 5mm C1
Keramik
RM2,5, 16pF C2
Keramik
RM2,5, 16pF C3
Elko 4,5mm,
10 µF C4
Elko 4,5mm,
0,1 µF C5
Keramik RM2,5, 100nF C6
Keramik RM2,5, 1nF C7
Keramik RM2,5, 1nF C8
Elko 4,5mm,
4,7 µF -
Stiftleiste, 2-polig -
Stiftleiste, 2-polig -
Sockelleiste, 3-fach -
Sockelleiste, 2-fach -
Sockelleiste, 1-fach | R1
R1, 68R R1
R1, 68R R1
R1, 68R R1
R1, 68R R2
R2, 68R R2
R2, 68R R2
R2, 68R R3
R3 1k, 1k R3
R3 1k, 1k R4
R4 1k,
1k R4
R4 1k,
1k R4
R4 1k,
1k R4
R4 1k,
1k R5
R5 1k,
1k R5
R5 1k,
1k R5
R5 1k,
1k R6
R6 1k, 1k R6
R6 1k, 1k R12 R12
10k, 10k | Q1
TO-92, BC337 Q2
TO-92, BC337 Q3
TO-92, BC337 Q4
TO-92, BC337 Q5
TO-92, BC337 Q6
TO-92, BC337 Q7
TO-92, BC337 Q8
TO-92, BC337 Q9
TO-92, BC337 Q11 TO-92,
BC327 Q12 TO-92,
BC327 IC1
DIL28, ATmega8 IC2
IR-Empfänger IC3
TO-220, 7805 X1
Quarz, 16 MHz BR1 Gleichrichter,
B380C800DIP |
3 Umsetzung
Nachdem
die Platine auf dem
Computer fertig war, haben wir uns an die Arbeit gemacht, die Teile zu
bestellen und angefangen den Plan in die Realität umzusetzen.
Nach
einiger Zeit war die
Platine soweit fertig und wir hatten unser erstes Problem. Zum Testen
musste
sich die Platine drehen! Wie lässt man eine ca. 200g schwere Platine
drehen.
Und wichtiger wie befestigt man sie? Nach Berechnung der Fliehkräfte
tritt an
der Spitze immerhin das 250-fache der Fallbeschleunigung auf.
3.1 Es dreht sich
Nach
einigen Versuchen mit
verschiedenen Motoren, haben wir uns für einen 90x90mm großen PC-Lüfter
entschieden. Diese Lüfter haben bei einer Betriebsspannung von 12 Volt,
genügend Kraft um die Platine zügig in Rotation zu versetzen, der
Propeller ist
kugelgelagert und sie bieten genug Auflagefläche um die Platine zu
befestigen.
Erste Versuche mit Lüftern der Größe 80x80mm hatten nicht genügend
Kraft und
waren nicht kugel- gelagert. Als Befestigungsmittel haben wir uns für
drei M3
Senkkopfschrauben, die im Rotorkopf versenkt wurden, entschieden. Somit
hatten
wir Schrauben auf dem Rotorkopf, mit denen es uns dann möglich war die
Platine
zu befestigen.
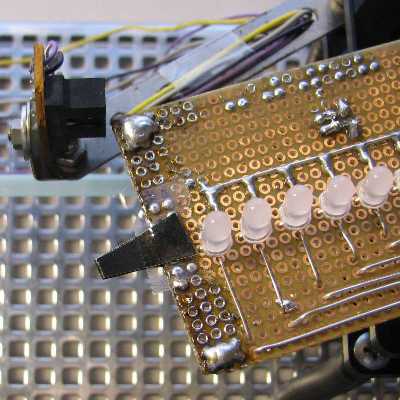
 Der angeschraubte
Läufer mit der Sekundärspule in Schrumpfschlauch
Der angeschraubte
Läufer mit der Sekundärspule in Schrumpfschlauch
Da
wir diese Art der
Befestigung noch nicht bei der Planung berücksichtigt hatten, haben wir
einen
"Doppelten Boden" an die Platine gelötet und konnten daran alles
verschrauben.
3.2
Spannungsversorgung
Die
Spannungsversorgung hat
uns gleich zum nächsten Problem geführt.
Wir brauchten "Wireless-Strom"!
Wir haben uns für eine Induktionsspannungsversorgung, also zwei Spulen, entschieden. Diese Lösung hatte Nachteile. Es ist eine Übertragung mit NF-Wechselspannung, ungünstigem Wirkungsgrad und unerwünschter Wärmeentwicklung. Der schlechte Wirkungsgrad ist auf die Bauform des Rotors zurück zu führen, da dieser einen geschlossenen Metallring um den Ferritkern hat.
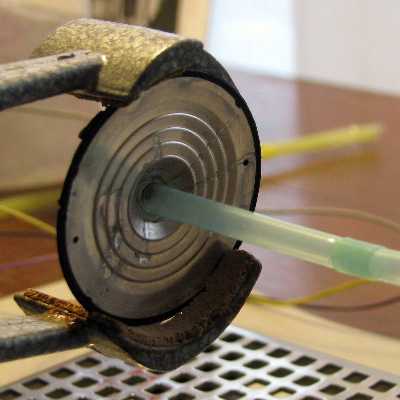
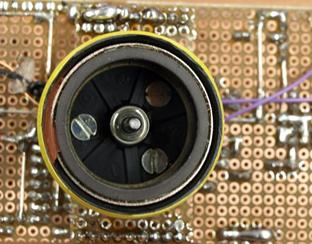 Der Rotor angeschraubt
mit drei M3 Senkkopfschrauben
Der Rotor angeschraubt
mit drei M3 Senkkopfschrauben
Für die Stabilität, Laufeigenschaften und EMV im PC super aber nicht für uns. Dieser Metallring erzeugt, ähnlich wie beim Induktionsherd, eine relativ hohe Wärmeentwicklung. Diese war so groß, dass das Klebeband, mit dem wir den Draht der Spule befestigten, sich zusammenzog und somit nicht mehr hielt. Die Lösung war ein übergroßer Schrumpfschlauch, dem die Wärmeentwicklung bestens gefiel.
Zum
anderen Nachteil mit
der Wechselspannung haben wir ein Brückengleichrichter, ein 220µF Elko und ein Spannungs-IC auf die
Platine gesetzt. Somit hatten wir bei der Eingangsspannung freie
Auswahl bis
25V bei 1 Ampere und haben am Ende immer stabile 5V Ausgangsspannung.
Das
ist aber erst der
Anfang, also das Gleichrichten.
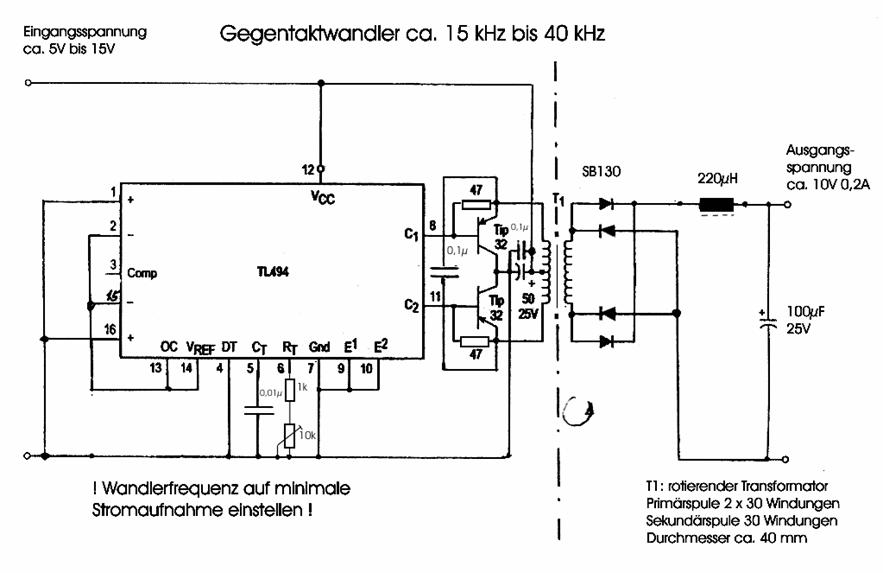
s muss aber erst eine Wechselspannung erzeugt werden. Für diesen Zweck haben wir wieder auf Lochraster einen zusätzlichen Spannungswandler entwickelt und aufgebaut, welcher uns eine Wechselspannung mit ca. 20kHz erzeugt.
 Der Spannungswandler
Der Spannungswandler
Bei unserer Schaltung haben Versuche ergeben, dass die 20kHz den besten Wirkungsgrad hatten.
Zurzeit
nutzen wir 12 V Betriebsspannung bei einer
Gesamtstromaufnahme der Propellerplatine und des Motors von 0,81A.
3.3 Software
Aus
Zeitgründen benutzten
wir auch das fertige Programm zum Schaltplan. Leider passte unsere
Hardware
nicht hundertprozentig, weshalb wir das Programm an unsere
Bedürfnisse anpassen mussten.
3.4 Funktionstest
Der
erste Funktionstest
zeigte, dass unsere Uhr starke Vibrationen erzeugte und somit konnten
wir
unsere 12V Betriebsspannung nicht erreichen. Ausbalancieren und
Auswuchten
waren angesagt.
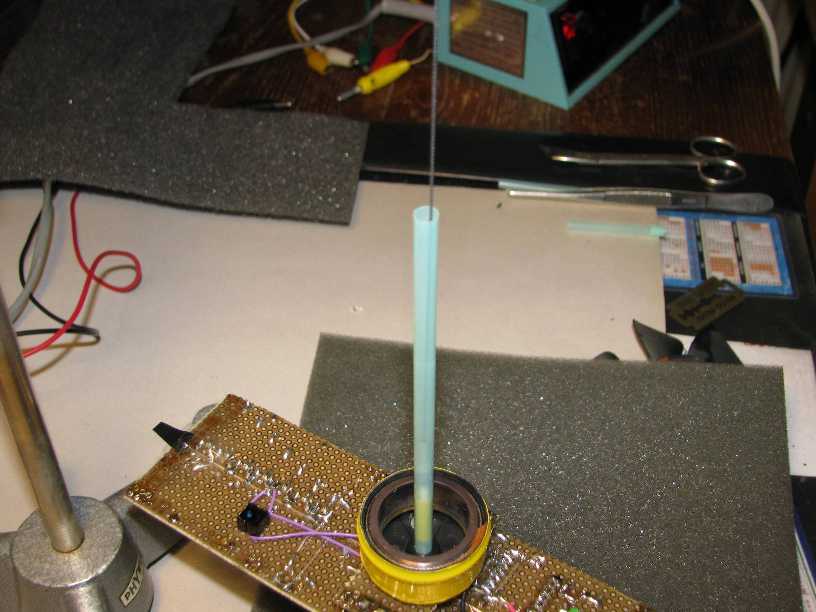
Für das Ausbalancieren haben wir die Platine mit Hilfe eines Stativs, eines geraden Plastikrohrs, das auf der Motorwelle aufgeschoben wurde und mit ihr fluchtete und einem zentrisch angebrachten Bindfaden aufgehängt. Somit konnten wir sehen in welche Richtung die Platine kippt und mit etwas Lötzinn ausbalancieren.
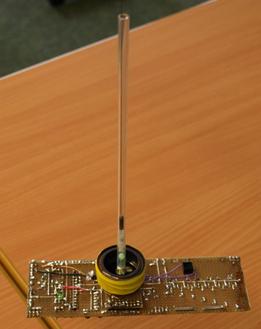 Ausbalancieren mit koaxialer
Anordnung von Glasrohr und zentrischem Faden
Ausbalancieren mit koaxialer
Anordnung von Glasrohr und zentrischem Faden
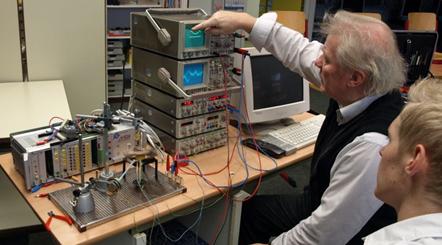
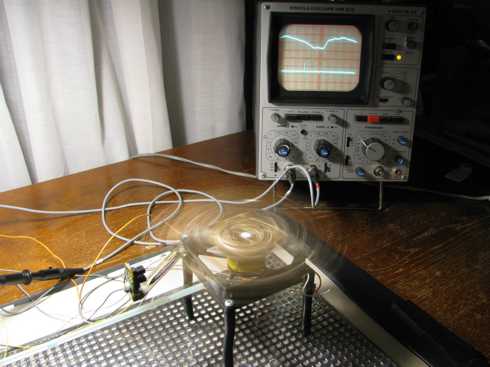
Für das Auswuchten hat
Herr Scholle mit uns eine Vorrichtung entwickelt. Hauptbestandteile des
Messstandes sind zwei Kohlemikrofone, zwei Oszilloskope,
eine Lichtschranke und ein elastisch aufgehängter Lüftermotor worauf
sich alles leicht bewegen konnte. Die Bewegung wurde durch angeklebte
Strohhalme
auf die Mikrofone übertragen, diese haben die mechanischen Auslenkungen
in elektrische Spannungen umgesetzt.
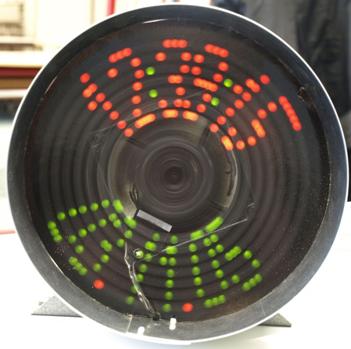
 Die Unwucht wird sicht-
und lokalisierbar
Die Unwucht wird sicht-
und lokalisierbar
Der zweite Funktionstest mit laufender Software zeigte, dass der Quarz nicht mit der korrekten Taktfrequenz lief und somit die Ausgabe nicht lesbar war. Die Anpassung auf die richtige Taktfrequenz behob dieses Problem. Des Weiteren wurde die Anzeige spiegelverkehrt ausgegeben was durch die gegenläufige Drehrichtung unseres Motors im Vergleich zu unserem Vorbild verursacht wurde.
Im Programm mussten wir daher die Bitmuster der Zeichen "spiegeln" und die Reihenfolge der Zeichenausgabe umkehren. Eine Drehrichtungsumkehr war nicht möglich, da wir innerhalb des Antriebsmotors die Phasenfolge nicht verändern konnten.
3.5 Stellen der
Uhrzeit
Zitat
aus
(http://home.foni.net/~akniesel/)
Die Uhrzeit
wird über Infrarot im
RC5-Code gestellt, den alle handelsüblichen Fernbedienungen
unterstützen. Ich
habe sie auf Pioneer eingestellt, und die Uhr reagiert nur auf den VCR-Modus. Der Stellvorgang wird
mit der Kanal-nach-oben-Taste
eingeleitet. Sofort reagiert die zu
stellende Ziffer mit dem Wechsel ihrer Farbe. Somit sieht man immer auf
einen
Blick welche Ziffer nun gestellt wird. Die Uhrzeit wird dann über die
Zahlentastatur eingegeben. Nach dem setzen der Uhrzeit geht es gleich
zum Datum
über. Den Stellvorgang kann man jederzeit mit der Stop-Taste abbrechen.
Wenn
man nur das Datum stellen will kann man das mit der Kanal-nach-unten-Taste
beginnen.
Fehleingaben
sind ausgeschlossen,
man kann also keine Stunden größer als 23 oder Minuten größer als 59
eingeben.
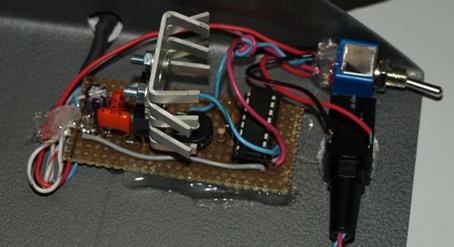
4 Ergebnis
Das
Ergebnis ist eine
funktionierende Propeller-Uhr die allerdings ein wenig laut ist.
Zum Schutz und der Optik wegen haben wir noch ein Aluring um die Uhr gebaut und den Hintergrund schwarz lackiert.
 Hurra, sie läuft!
Hurra, sie läuft!
Der von uns verwendete Mikrocontroller verweigerte gelegentlich das Umprogrammieren, obwohl wir keine Schutzbits gesetzt hatten, so dass wir einen neuen verwenden mussten.
-
Damit nicht zu große und schlecht zu korrigierende Unwuchten entstehen, sollte möglichst wenig Masse (Lötzinn, Drähte usw.) verwendet werden.
Ein möglichst symmetrischer Aufbau wäre auch gut.
Unbedingt sollte vor dem Bestücken die Befestigung der Platine am Motor geklärt sein.
-
Die Wechselrichterschaltung sollte immer mit mindestens 6 V eingeschaltet werden. Bei einer allmählichen Spannungserhöhung von Null auf z. B. 6 V schwingt sie manchmal nicht an und neigt zur Selbstzerstörung.
5 weitere Bilder vom Projekt
 Mathias arbeitet am Fuß
der Uhr
Mathias arbeitet am Fuß
der Uhr
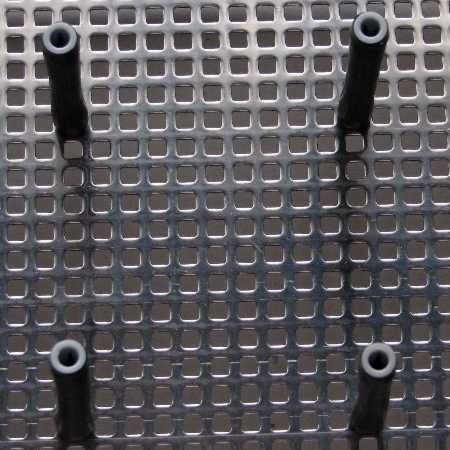 Vier Gummischläuche mit eingesetzten
Dübeln als Schwingungsstand
Vier Gummischläuche mit eingesetzten
Dübeln als Schwingungsstand
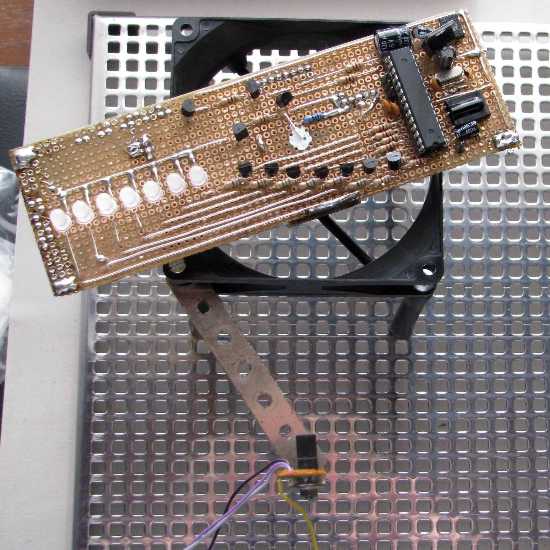
 unser Versuchsstand mit montiertem Stator
unser Versuchsstand mit montiertem Stator
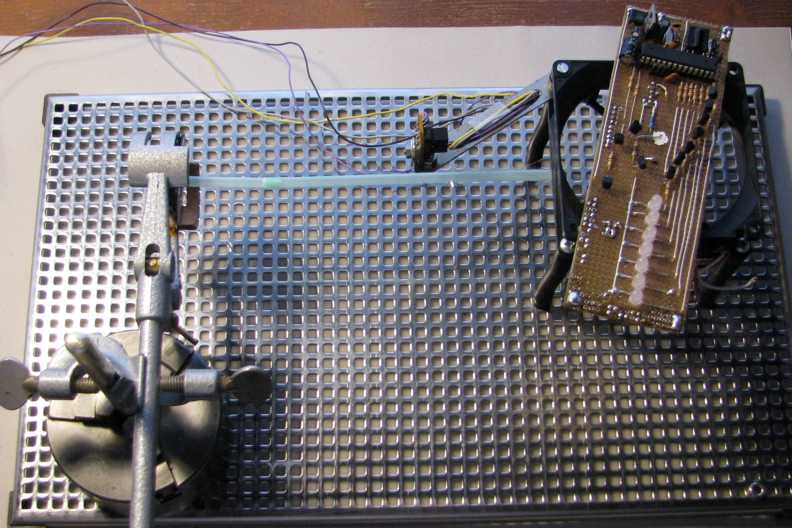
 Der Tanz mit
Julians Platine kann beginnen
Der Tanz mit
Julians Platine kann beginnen
Schwingungskopplung mit Trinkhalm zwischen Versuchsstand und Kohlemikrofon
 Die Gabellichtschranke zur
Positionserkennung
Die Gabellichtschranke zur
Positionserkennung
 angeklebter
Trinkhalm am Kohlemikrofon
angeklebter
Trinkhalm am Kohlemikrofon
 nochmals ein Bild des Ausbalancierens
nochmals ein Bild des Ausbalancierens
Hier läuft die Häckselmaschine.
Ohne Schutzring schon recht gefährlich. Es könnte was ins Auge gehen.
Immerhin haben wir versuchsweise bis zu 1800 U/min ausprobiert - allerdings mit Schutzring.
Es hat alles standgehalten.
 ein
bisschen Chaos darf schon sein
ein
bisschen Chaos darf schon sein
 Julian
gibt niemals auf
Julian
gibt niemals auf
6 Quellenangabe
Programm
Lochmaster:
http://www.abacom-online.de/html/lochmaster.html
Schaltplan
und Software
http://home.foni.net/~akniesel/
Datenblätter